
В июльском номере 2023 г. журнала «Электросвязь» опубликована статья «Реконфигурируемые интеллектуальные поверхности RIS (Reconfigurable Intelligent Surfaces) и их применение в сетях 6G».
Ниже публикуется полный текст статьи, без сокращений.
Реконфигурируемые интеллектуальные поверхности RIS (Reconfigurable Intelligent Surfaces) и их применение в сетях 6G
Безумие – повторять одно и то же действие, и ожидать другого результата.
(«The Ultimate Quotable Einstein», Princeton University Press, 2013)
1. Введение
В сетях 6G главные технологические новшества имеют место в трёх основных взаимосвязанных областях:
- Коммуникации двойного массированного MIMO в миллиметровом диапазоне (mmWave Doubly-Massive-MIMO)[1];
- Коммуникации в терагерцовом диапазоне (THz)[2];
- Реконфигурируемые интеллектуальные поверхности RIS (Reconfigurable Intelligent Surfaces)[3].
Эти три ключевые технологии находятся во взаимосвязанной синергетической зависимости, как показано на рис. 1.
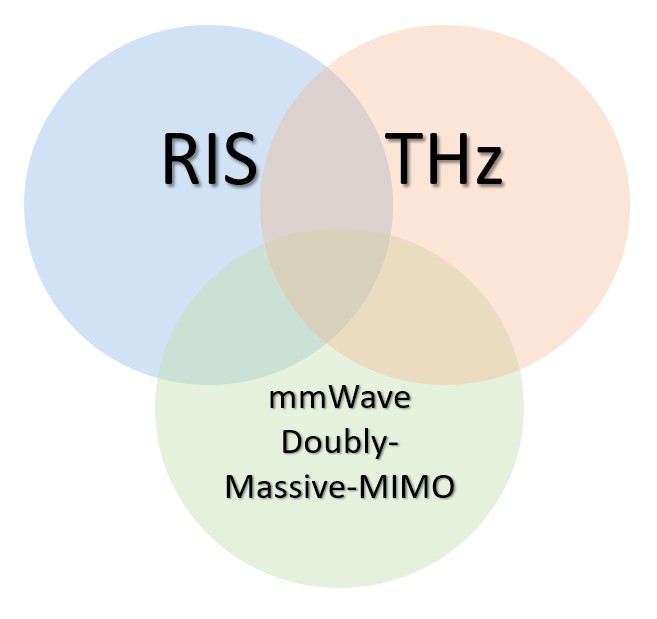
Рисунок 1 – Синергия основных инновационных технологий 6G.
Технология RIS также известна под другими названиями:
- Интеллектуальные отражающие поверхности IRS (Intelligent Reflecting Surfaces);
- Программно-управляемые метаповерхности (Software-controlled metasurfaces, либо программно-управляемые гиперповерхности (Software-controlled hypersurfaces);
- Большие интеллектуальные антенны, либо поверхности (Large intelligent antenna/surface);
- Голографические MIMO-поверхности HMIMOS (Holographic MIMO-surface).
- Большие интеллектуальные поверхности LIS (Large Intelligent Surface).
1.1. Краткая предыстория
Развитие первых пяти поколений мобильной связи было основано на следующих постулатах:
- Беспроводная среда (радиоэфир) между устройствами связи неизменна по своей природе, повлиять на неё невозможно;
- Эта среда не может быть изменена или улучшена;
- Проблемы распространения радиосигнала могут быть компенсированы только при помощи сложных схем на концах передачи и приёма.
Однако, становится очевидным, что улучшения только в точках передачи и приёма беспроводной среды недостаточны для того, чтобы удовлетворять растущим требованиям 6-го поколения мобильной связи. Требуются новые архитектурные платформы, которые позволят развивать такие услуги 6G, как расширенная реальность XR (eXtended reality), беспилотные и взаимодействующие транспортные средства (driverless and collaborative transportation), объединённые коммуникации с улучшенной локализацией и сенсорикой (joint communication, localization and sensing), удалённая хирургия (remote surgery), тактильный Интернет (tactile Internet) и другие, требующие малой задержки, высокой скорости доступа и возможностей аналитики больших объёмов данных.
Такие приложения требуют малой задержки распространения сигнала, высокой скорости доступа и возможностей аналитики больших объёмов данных. Годы развития традиционных решений по улучшению технических характеристик конечных устройств радиоканала показали, что традиционными средствами, без влияния на среду распространения, вышеуказанных требований достичь невозможно.
1.2. Новая парадигма
В последние годы зародилась новая парадигма: конфигурирование самой среды распространения радиоволн, а не только конечных точек (передатчика и приёмника). Такой подход предусматривает отказ от прошлого постулата о неподконтрольности беспроводной среды.
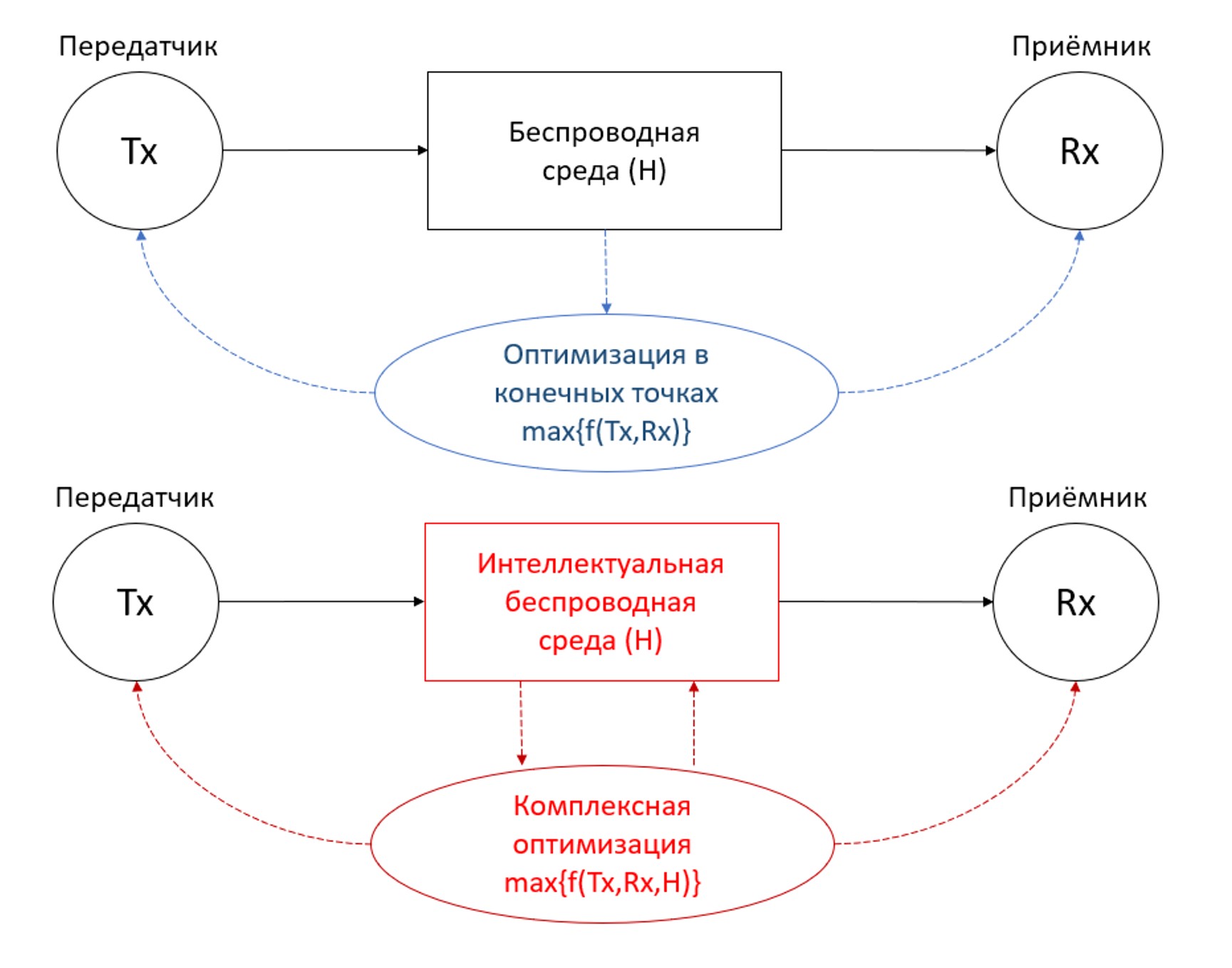
Рисунок 2 – Переход к программному конфигурированию беспроводной среды.
Мощность излучения традиционной базовой станции мобильной связи может достигать нескольких десятков Ватт, однако, устройства пользователей могут принимать сигнал мощностью в несколько микро-Ватт. Остальная излучаемая базовой станцией мощность, в основном, рассеивается в пространстве. Кроме того, такое положение вещей может представлять также и угрозу безопасности, поскольку при этом невозможно контролировать, в каких направлениях распространяется радиосигнал, кем он может быть принят, или даже передан[4]. Например, одной из уязвимостей сетей 2G является возможность создания «ложной базовой» станции (IMSI Catcher), через которую злоумышленник может получить конфиденциальные данные, например идентификатор абонента IMSI и пр.[5].
В процессе перехода к 6-му поколению мобильных сетей была сделана попытка преодолеть парадигму неизменности среды распространения, что и является одной из основных отличительных черт 6G. То есть, была поставлена цель по управлению самой средой распространения сигнала, а не только устройствами передачи и приёма на концах радиоканала.
Некоторые усилия в этом направлении предпринимались и ранее. Например, в последние годы принципы цифрового управления стали активно применяться в таких технологиях как Massive MIMO[6], использующих принцип мультиплексирования нескольких радиоканалов для изменения характеристик общего радиоканала с целью повышения эффективности и качества передачи.
В сетях 4G LTE использовалась технология CoMP (Coordinated Multi-Point)[7], в которой приём или передача нескольких базовых станций координировались при обслуживании нескольких пользователей. При этом удавалось достичь снижения взаимной интерференции сигналов, которая ухудшала качество приёма для отдельных пользователей такой группы, особенно находящихся на границе соты (зоны покрытия одной базовой станции).
В сетях 5G использовалась сходная технология Distributed MIMO[8], которая позволяла достичь существенного улучшения приёма в т.н. «малых сотах» (small cells) в диапазонах NR (New Radio).
Повышение частот 5G NR и уменьшение размеров сот рано или поздно приведёт к появлению т.н. «бессотовой» сети (cell-free network)[9]. Это сеть с очень большим количеством точек доступа, распределёнными по территории, и подключенными к единому процессорному устройству, которое управляет как передачей, так и приёмом. Такая концепция известна как cell-free massive MIMO[10].
Однако, несмотря на все эти усилия, радио-среда беспроводных сетей (любого вида) продолжает рассматриваться как неуправляемый, природный фактор и считается, что на неё невозможно повлиять каким-то искусственным образом. Распространение сигнала при помощи радиоволн сопровождается отражениями, затуханиями и рассеянием. Поэтому, достигая приёмника, сигнал приходит туда сильно ослабленным и искажённым. Этот фактор ограничивает возможности снижения излучаемой мощности и повышения качества принимаемого сигнала.
Одним из способов решения этой проблемы являются технологии реконфигурируемых интеллектуальных поверхностей RIS, которые в последние годы привлекли внимание как научных, так и промышленных кругов в мире.
Были проведены исследования, проектирование оборудования и создание прототипов. Проведено моделирование и оптимизация систем. В настоящее время развёрнута работа стандартизации RIS[11].
RIS могут отражать или самостоятельно излучать электромагнитные волны их при заданных характеристиках отраженной или генерированной волны. Это достигается за счет предварительной или динамической настройки электромагнитных характеристик элементов RIS.
В настоящей статье будет рассмотрена технология реконфигурируемых интеллектуальных поверхностей RIS (Reconfigurable Intelligent Surfaces), исследованы её преимущества и возможности для предоставления отличительных и прорывных услуг 6G, а также показано состояние развития и стандартизации технологии RIS.
2. Технология RIS
Поверхность RIS – это искусственный практически двумерный материал (с пренебрежимо малой толщиной), обладающий особыми электромагнитными свойствами, зависящими от его структуры[12]. Свойства RIS можно программно конфигурировать и управлять ими под воздействием внешних воздействий.
Работа RIS может быть представлена в виде двух перемежающихся во времени фаз:
- Программирование и управление. Сбор и оценка необходимой информации для конфигурации рабочего цикла и конфигурирование элементов RIS на основе этой информации;
- Рабочий цикл. RIS, сконфигурированная соответствующим образом на предыдущей фазе, участвует во взаимном обмене электромагнитной энергии радиоволн передающих и принимающих устройств в сети.

Рисунок 3 – Фазы работы RIS.
2.1. Прототипы RIS.
Несмотря на то, что в настоящее время практическая реализация реконфигурируемых интеллектуальных поверхностей остаётся делом будущего, уже существуют прототипы, демонстрирующие принципы и основные свойства RIS. Приведем примеры некоторых из них:
2.1.1. Прототип RFocus MIT (Технологический института штата Массачусетс)[13].

Рисунок 4. Прототип RIS, созданный в MIT.
Прототип RFocus состоит из 3720 недорогих антенн, размещённых на площади в 6 м2. Каждый элемент антенны при массовом производстве будет стоить не более нескольких центов. Антенны могут быть адаптивно сконфигурированы под воздействием низковольтных электронных схем, таким образом, что при отражении они концентрируют падающую на них электромагнитную волну в тонкий луч нужной направленности. Таким образом, по заявлению разработчиков из MIT, можно повысить мощность сигнала на стороне приёма на порядок и выше.
2.1.2. Прототип NTT DOCOMO[14].
В департаменте исследований японского оператора NTT DOCOMO был создан прототип RIS на основе тонкого «умного стекла» (smart glass), на котором в определённом порядке размещены пассивные элементы с размерами менее длины волны радиоканала. Путем небольших перемещений такого стекла можно реализовать три режима взаимодействия с радиоволной: полное сквозное проникновение волны через стекло; частичное отражение радиоволны, либо полное отражение всех падающих радиоволн. Стекло обладает высокой прозрачностью, таким образом, его можно размещать, например, на окнах зданий без влияния на светопропускание, а также в местах, где по тем или иным причинам нельзя устанавливать базовые станции (например, стройплощадки или внутренние помещения), или там, где приём сигналов нужно селективно блокировать. Такие поверхности не нарушают эстетику объектов и помещений, их можно использовать также в транспортных средствах или на стенах зданий и сооружений.
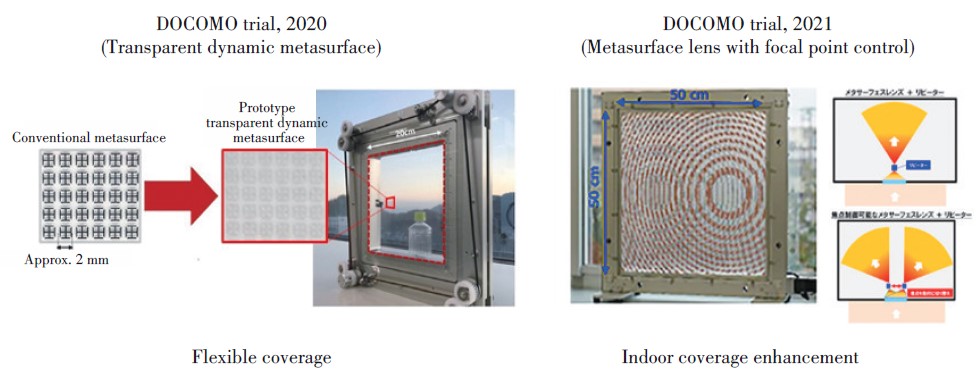
Рисунок 5 – прототипы RIS компании NTT DOCOMO.
2.1.3. Прототип KTH Royal Institute of Technology и Huazhong University of Science and Technology
Прототип системы радиосвязи на базе RIS, созданный в результате совместной работы исследователей стокгольмского технологического института KTH Royal Institute of Technology и университета в китайском городе Ухань Huazhong University of Science and Technology[15], показан на рисунке ниже.
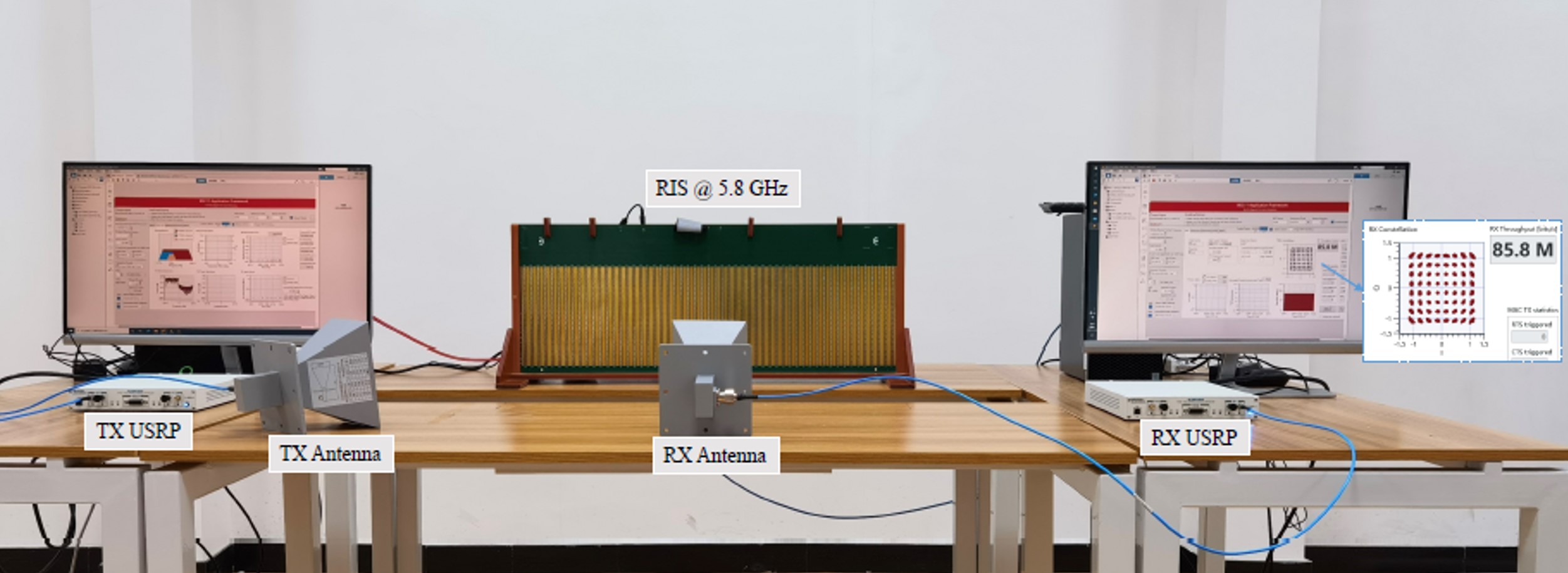
Рисунок 6 — Прототип RIS, KTH Royal Institute of Technology Huazhong University of Science and Technology.
Испытательный стенд включал в себя антенну передатчика (TX Antenna), антенну приёмника (RX Antenna), поверхность RIS, настроенную на частоту несущей 5.8 ГГц, а также станции управления TX_USPR и RX_USPR на сторонах передачи и приёма, которые эмулировали пользовательское оборудование и точку доступа (либо базовую станцию). По радиоканалу с RIS передавался видеопоток. Для упрощения эксперимента чувствительность элементы RIS были ориентированы в горизонтальном направлении, поскольку пользователи с радио-терминалом чаще перемещаются в горизонтальной плоскости и реже – в вертикальной. В ходе эксперимента было испытано слежение направленным лучом за перемещающимся в горизонтальной плоскости приёмником видеопотока.
RIS в данном прототипе выполняет роль «умного рефлектора», который превращал падающий на него ненаправленный радиосигнал в луч, направленный на приёмную антенну. Приёмник формирует сигнал обратной связи согласно качеству принимаемого видеосигнала, по которому осуществляется управление отражающими элементами RIS, формирующими направленный в пространстве луч радиоканала.
2.2. Устройство RIS
Поверхности RIS могут иметь несколько различных видов отражающих элементов, которые могут использовать разные принципы отражения и преобразования радиосигнала. Ниже будут рассмотрены некоторые из них, поскольку возможности реализации основной идеи RIS (управляемое отражение и преобразование радиосигнала, чаще всего, с целью формирования направленного луча), достаточно обширны и с течением времени появляются всё новые реализации данной идеи.
В целом, можно описать RIS как поверхность, которая обладает интеллектуальными (smart) свойствами:
- возможность преобразовывать форму отражённого радиосигнала, которая возникает не только вследствие природных факторов;
- возможность реконфигурации в любой момент, когда среда распространения радиоволн и состояние радиосети этого требуют.
Исследовательская группа ETSI ISG RIS[16], определяет RIS как практически пассивную реконфигурированную поверхность, которая:
- выполнена с использованием массива пассивных элементов;
- не требует дорогих активных компонентов, таких как усилители мощности;
- может использовать простые функции обработки сигнала, реализуемые несложными электрическими схемами для изменения конфигурации элементов;
- оснащена простыми радиочастотными цепями для приёма и посылки управляющих сигналов.
Эти характеристики предполагают, что RIS представляет собой надёжное и экологичное решение, не требующее высоких затрат энергии при работе, и весьма недорогое при массовом производстве.
На рисунке ниже показана базовая структура RIS[17].

Рисунок 7 – Базовая структура RIS.
Как показано на рисунке, RIS представляет собой массив элементов, каждый из который может независимо от других производить требуемый сдвиг отражённой электромагнитной волны по фазе, а также, возможно, увеличивать его амплитуду. Регулируя фазу и амплитуду на всех элементах массива, можно достигать изменения направления суммарной отражённой электромагнитной волны с концентрацией луча в определённом направлении. Каждый элемент RIS может состоять из множества составных частей, которые называются ячейками элемента. Ячейки элемента могут иметь разную форму и разные размеры. Если все элементы RIS выполнены из одинакового набора ячеек и если они расположены в определённом повторяющемся порядке, то расстояние между одинаковыми ячейками в соседних элементах называется «периодом метаповерхности» (metasurface period).
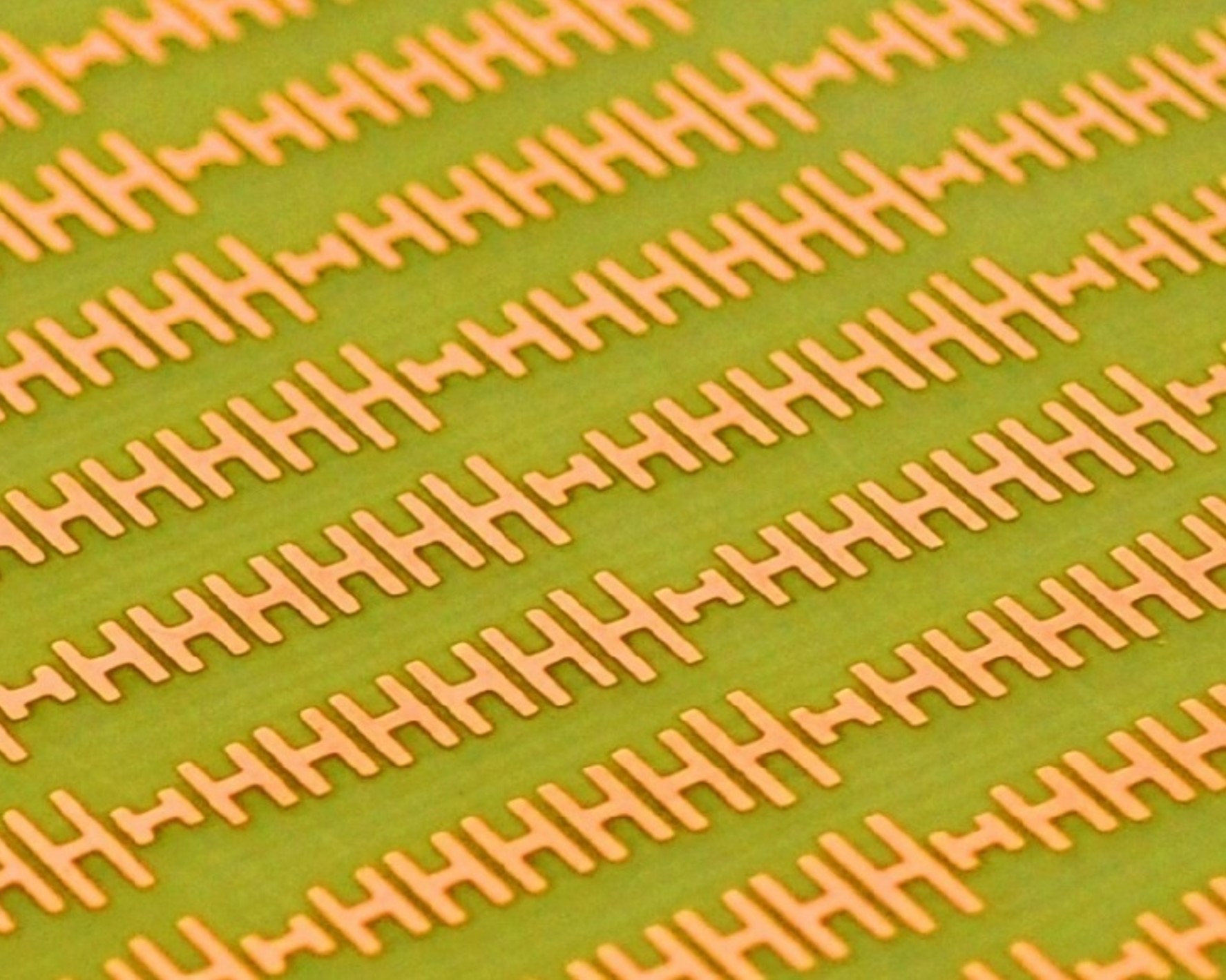
Рисунок 8 – Пример периодической метаповерхности.
Дизайн ячеек элемента выполняется таким образом, чтобы реализовать то или иное преобразование падающей на поверхность RIS электромагнитной волны. Изменение конфигурации RIS достигается при помощи ячеистой сети цепей настройки, а также линии смещения (biasing line), напряжение на которой управляет ячейками элемента.
В частности, на рисунке выше, цепями настройки могут быть, например, PIN-диоды, у которых между областями с проводимостью положительных (p) и отрицательных (n) зарядов, имеется слой нейтральной проводимости i (intrinsic). Такие диоды также называются варакторами (varactor), управляемыми приложенным напряжением.
Устройство PIN-диода показано на рисунке ниже.

Рисунок 8. Устройство PIN-диода.
Такие диоды также называются варакторами (varactor), управляемыми приложенным напряжением. В зависимости от напряжения, поданного на линию смещения, свойства RIS по отражению электромагнитных волн могут изменяться, в т.ч. можно изменять фазу несущей частоты радиосигнала. Цепь настройки и линия смещения могут управлять как отдельной ячейкой, так и множеством элементов RIS одновременно. Это даёт возможность простого и недорогого «тонкого управления» электромагнитными волнами, в отличие от других технически затратных и дорогих способов.
На рисунке ниже показан пример практической реализации RIS с элементами, состоящими из 196 одинаковых элементов, каждый из которых содержит 4 варактора[18].

Рисунок 9 – RIS из 196 элементов с PIN-диодами (варакторами).
2.3. Применение RIS в сетях радиодоступа
В сетях радиодоступа RIS может применяться в нескольких сценариях. На рисунке ниже показано самое простое и очевидное применение, когда, с помощью RIS можно повысить мощность принимаемого на терминале абонента сигнала. Без RIS вне прямой видимости между базовой станцией и терминалом абонента мощность принимаемого сигнала может быть ослаблена из-за наложения сигналов с разными фазами φ1, φ2, φ3. Использование RIS даёт возможность активного управления фазой сигнала φ так, что на терминал абонента приходят отраженные и направленные лучи от панелей RIS в одинаковой фазе φ0. Таким образом, мощность принимаемого сигнала на терминале повышается, а мощность излучения передающей базовой станции может быть наоборот снижена. Рисунок 10 – Применение RIS в сети радиодоступа 6G.

Рисунок 10. Применение RIS в сети радиодоступа 6G.
Другие варианты использования RIS могут включать многопотоковые и многоантенные передатчики с общей радиочастотной схемой, иногда называемые голографическими поверхностями (holographic surfaces), голографическим MIMO (holographic MIMO), а также голографическими MIMO-сплиттерами HMIMOS (Holographic MIMO Splitter)[19].
В дальнейшем, поскольку HMIMOS (Holographic MIMO Splitter) являются разновидностью RIS, для упорядочения будем называть все разновидности как «RIS», несмотря на то что в источниках они могут называться по-другому (HMIMOS, LIS и пр., см. раздел 1. Введение).
2.4. Режимы работы и классификация RIS
На рисунке ниже показаны активный и пассивный режимы работы HMIMOS, а также четыре режима преобразования электромагнитных волн: поляризация, формирование нескольких лучей, концентрация в одном луче (beamforming) и поглощение электромагнитной волны.

Рисунок 11 – Режимы работы RIS [18].
2.4.1. Активные RIS
Если RIS содержит радиочастотные цепи и элементы со схемами обработки сигнала, то используется термин «активные RIS»[20]. Активные RIS, по сути, являются естественной эволюцией систем massive MIMO, когда на двумерной поверхности определённых размеров по мере развития технологий размещалось все больше программно-конфигурируемых антенных элементов. Практическая реализация RIS может представлять собой большое число антенных элементов (ячеек) очень малых размеров с реконфигурируемыми сетями обработки. Такая структура может быть использована для передачи и приёма сигнала на всей поверхности с использованием принципа голограммы[21].
Другая реализация активной RIS использует массив дискретных фотонных антенн, которые содержат оптико-электрические детекторы, конверторы и модуляторы для передачи, приёма и преобразования оптического или радиочастотного сигнала17.
2.4.2. Пассивные RIS.
Пассивные RIS работают либо как отражающая метаповерхность, изменяющая параметры радиосигнала, либо как «волновой коллектор», поглощающий радиоволны. Элементы метаповерхности могут быть запрограммированы для изменения падающего на них электромагнитного поля в зависимости от той или иной задачи[22]. По сравнению с активными, пассивные HMIMOS обычно состоят из недорогих пассивных элементов, не требующих внешних источников питания. Их электрические схемы и встроенные сенсоры могут получать питание от зарядных модулей, собирающих энергию из падающей на них электромагнитной волны (energy harvesting modules). Они, как правило, содержат общую линию управления или подключения к внешней сети (backhaul). Более того, пассивные HMIMOS могут быть легко интегрированы в существующие сети беспроводной связи, поскольку их весьма низкое энергопотребление и низкая стоимость дают возможность размещать такие поверхности на фасадах зданий, на стенах комнат и потолках рабочих помещений, а также на корпусах лаптопов или даже на одежде.
2.4.3. Классификация по структуре оборудования
2.4.3.1. Непрерывные (Continuous) HMIMOS.
Непрерывные HMIMOS содержат очень много элементов на ограниченной поверхности, для формирования пространственной непрерывной апертуры приемопередатчика[23].
Для лучшего понимания принципа работы непрерывной HMIMOS можно привести пример оптической голографии (почему их и называют голографическими). Как известно, голография — это метод, который позволяет записывать электромагнитное поле, которое обычно является результатом рассеяния источника сигнала от объектов, на основе принципа интерференции электромагнитных волн. Запись электромагнитного поля может быть впоследствии использована для реконструкции исходного поля, на основе принципа дифракции.

Рисунок 12 – Работа непрерывной HMIMOS по принципу голографии.
На этапе обучения, сгенерированный обучающий сигнал от источника радиочастоты расщепляется в разделителе луча на две волны: волну объекта и опорную волну. Волна объекта направляется на пользователя, где она формирует структуру электромагнитного поля (объект) в месте нахождения пользователя. Некоторая часть отраженной волны объекта смешивается с лучом опорной волны, и используется для обучения HMIMOS.
На этапе репликации, передаваемый сигнал сразу трансформируется в HMIMOS в восстановленную волну объекта.
Поскольку пространственно-непрерывная апертура HMIMOS обладает практически бесконечным числом антенных элементов, и по сути, является асимптотическим пределом Massive MIMO, то она может достигать значительно большего пространственного разрешения. Таким образом, можно создавать луч электромагнитной волны без нежелательных боковых лучей.
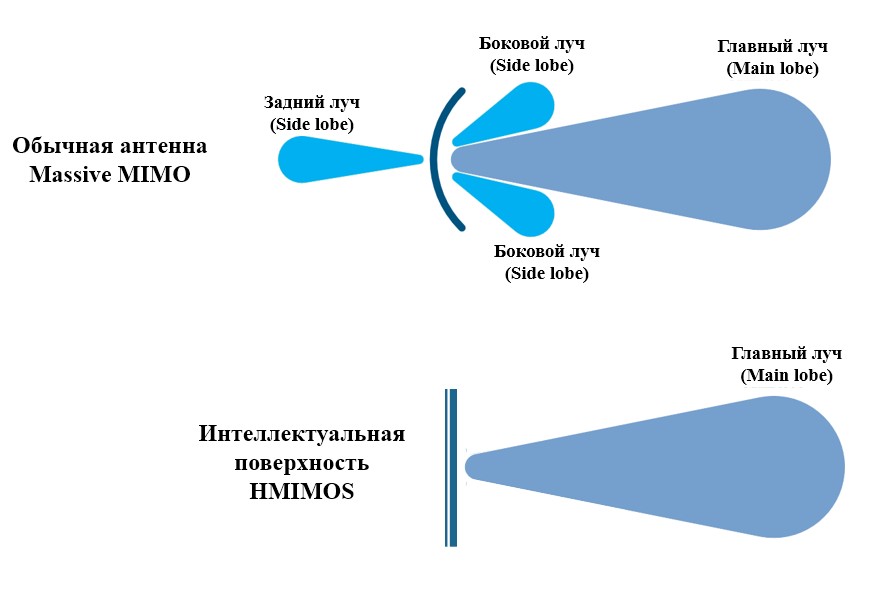
Рисунок 13 – Формирование лучей на обычной антенне Massive MIMO и на интеллектуальной поверхности HMIMOS.
3. Дискретные HMIMOS
Дискретные HMIMOS состоят из большого числа ячеек элементов, сделанных из программно-конфигурируемых метаматериалов с низким энергопотреблением. В них могут использоваться много различных средств и методов модификации электромагнитных свойств ячеек: от обычных недорогих электронных компонентов, имеющихся в широкой продаже, до жидких кристаллов, микро-электромеханических систем, а также других реконфигурируемых материалов.
Эти структуры существенно отличаются от обычных массивов антенн MIMO. Одна из реализаций дискретных поверхностей представляет собой дискретные элементы с отражательными свойствами, которыми можно управлять при помощи электроники[24].
3.1.1. Классификация по технологии производства
Известны различные технологии производства HMIMOS, такие как
- электронно-лучевая литография на частотах видимого света;
- гравирование фокусированным ионным лучом;
- интерференционная и литографическая нано-печать;
- непосредственное гравировка печатной платы лазером или микроволнами.
В целом, эти технологии производства используются для изготовления двух видов HMIMOS: непрерывной и дискретной, как показано на рисунке 10.
4. Непрерывная HMIMOS
Технология имплантирования PIN-диодов, использующая программируемые метаматериалы, которые реализуют практически непрерывную апертуру, показана на ниже [18]. Для изготовления такой структуры используется метаповерхность, которая отражает и преобразовывает электромагнитные волны в широком частотном диапазоне. Это непрерывная однослойная металлическая поверхность, которая состоит из практически бесконечного числа мета-частиц.

Рисунок 14 — Структура активной ячейки HMIMOS
Каждая метачастица содержит два металлических трапезоида, центральную металлическую полосу, которая тянется по всей вертикальной линии метачастиц, и два PIN-диода.
Путём независимого управления напряжения смещения на PIN-диодах, может постоянно (динамически) перепрограммировать поверхностное сопротивление непрерывной HMIMOS, и таким образом, манипулировать фазой отражения радиоволн, амплитудой отраженного сигнала, и распределением фаз в широком частотном диапазоне[26]. Образ поверхностного сопротивления, это аналог образа оптической голограммы, и он может быть рассчитан, исходя их распределения электромагнитных полей опорной волны и отраженной волны объекта, как показано на рисунке 12. Используя искусственный интеллект и машинное обучение, можно выполнять формирование луча (beamforming) по принципу голограммы.
5. Дискретная HMIMOS
Дискретная HMIMOS обычно создаётся при помощи программно-конфигурируемых антенных метаповерхностей. Типовая логическая структура, не зависящая от физических характеристик, предложенная в[27] показана на рис 10 (б). Структура ячейки содержит слой метаматериала, слои сенсоров и активаторов (исполнительных устройств), слой экранирования, слой вычислений, также слои связи и интерфейса. Все слои выполняют различные функции.

Рисунок 15 – Структура ячейка пассивной HMIMOS (пример).
В частности, слой метаматериала выполнен из графена, и основная его функция – преобразовывать желаемое действие электромагнитной волны посредством применения реконфигурируемой модели. Функции слоя сенсоров и активаторов состоит в том, чтобы модифицировать поведение слоя метаматериала. Назначение слоя экранирования (обычная металлическая фольга) состоит в том, чтобы избежать интерференции между верхними и нижними слоями. Слой вычислений нужен для выполнения команд от слоя интерфейса или сенсоров. Наконец, слой интерфейса и связи нужны для координации действий вычислительного слоя, активаторов и сенсоров.
Дискретные HMIMOS впервые были разработаны французской компанией Greenerwave[28], которая показала экономическую эффективность концепции HMIMOS и использования дискретных мета-антенн.
Другая компания Pivotalcommware[29] (в число инвесторов которой входит Билл Гейтс) из Сан-Франциско разработала первые коммерческие продукты непрерывных HMIMOS на базе недорогих перемежающихся метаповерхностей, которые подтвердили окупаемость концепции на практике.
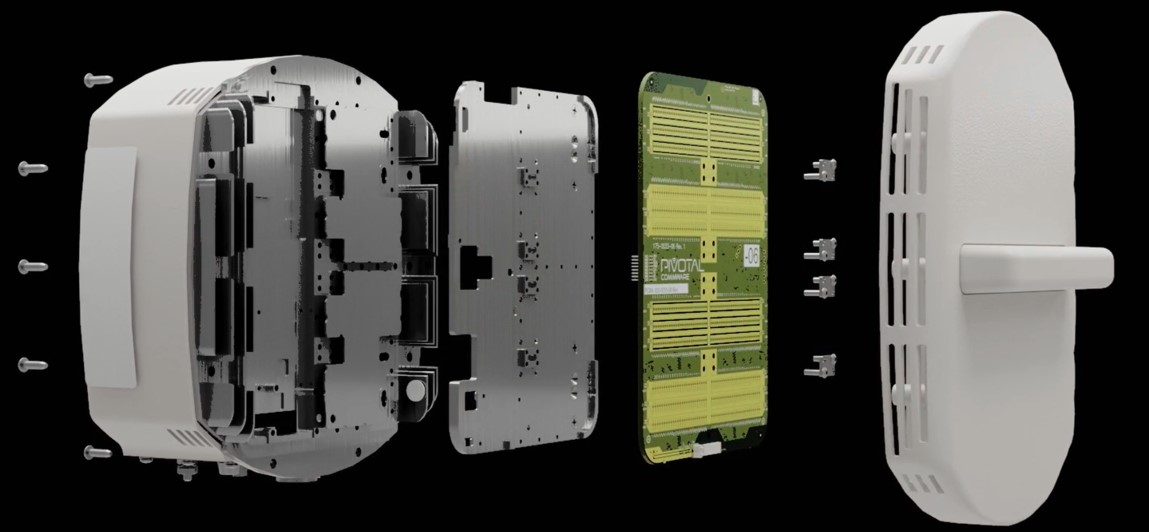
Рисунок 16 – релейный элемент антенны для формирования направленного луча с использованием концепции HMIMOS (из материалов компании Pivotalcommware).
5.1.1. Классификация по режиму работы
Обычно различают четыре основных режима работы HMIMOS:
- Непрерывная HMIMOS как активный приёмопередатчик;
- Дискретная HMIMOS как пассивный отражатель (рефлектор);
- Дискретная HMIMOS как активный приёмопередатчик;
- Непрерывная HMIMOS как пассивный отражатель (рефлектор);
Чаще используются первые два режима, которые и рассмотрим.
6. Непрерывная HMIMOS как активный приёмопередатчик
В этом режиме радиочастотный сигнал, генерируемый задним слоем поверхности HMIMOS, проходит через направляющую распределительную сеть на непрерывную поверхность, состоящую из «бесконечно большого» программно-конфигурируемых направляющих элементов, при помощи которых можно формировать множество лучей, направленных на целевых пользователей. Основное различие между активными непрерывными HMIMOS и реконфигурируемыми пассивными HMIMOS состоит в том, что при формировании луча в пассивной поверхности используется концепция голографии с использованием недорогих, лёгких, компактных программно-конфигурируемых антенн с низким энергопотреблением.
7. Дискретная HMIMOS как пассивный отражатель
Другой режим работы HMIMOS – зеркало, отражающее электромагнитные волны, или «волновой коллектор», когда дискретная HMIMOS используется в пассивном режиме. В этом случае HMIMOS содержит реконфигурируемые ячейки, которые работают в режиме формирования луча, похожем на режим «beamforming» обычного MIMO[30].
В большинстве работ, которые были исследованы при подготовки данной статьи, рассматриваются обычно самые простые режимы HMIMOS, которые легко реализовать и анализировать. Это говорит о том, что поле исследований и дальнейших разработок в области RIS в целом продолжает оставаться очень обширным.
7.1.1. Классификация по функционалу, характеристикам и приложениям связи
8. Функционал HMIMOS
Интеллектуальные поверхности могут использовать множество режимов взаимодействия электромагнитных волн, которые далее называются функциями. Функции HMIMOS можно сгруппировать в четыре основные группы как показано на рисунке ниже:
- Поляризация;
- Разброс;
- Формирование луча;
- Поглощение.
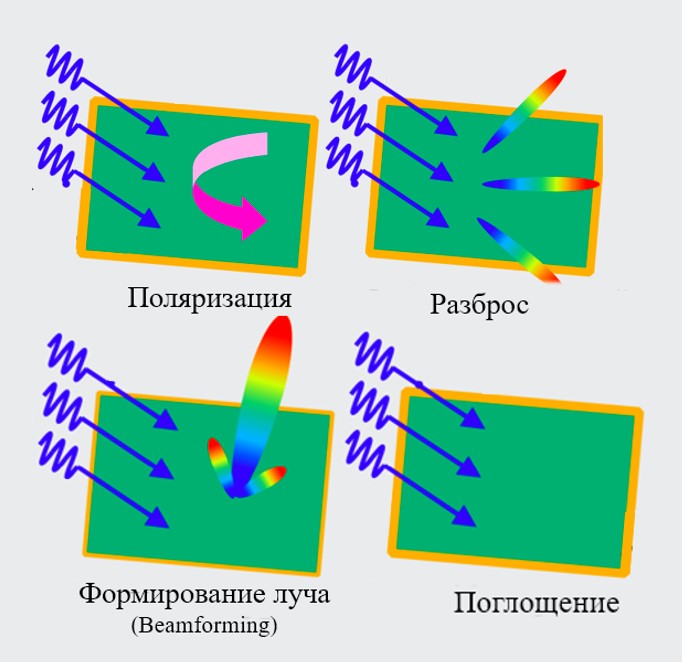
Рисунок 17 – Основные группы функций RIS.
- Поляризация электромагнитной волны. Поляризация достигается выравниванием направления колебаний электрических и магнитных полей в RIS.
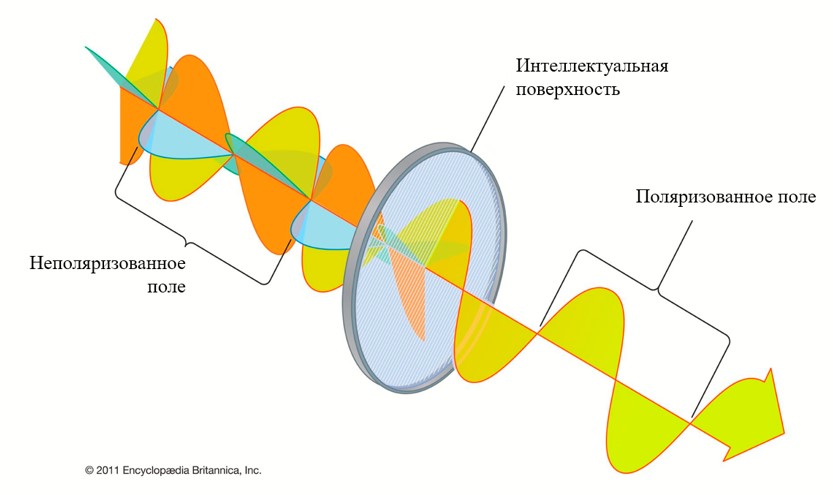
Рисунок 18 – Поляризация электромагнитной волны.
- Разброс многих направленных лучей. Поверхность RIS перенаправляет падающее на неё электромагнитное поле по однму или многим желаемым направлениям.
- Формирование луча (beamforming). Вся энергии падающего поля фокусируется на одном направлении на заданную точку на определённом расстоянии. Либо достигается эффект «коллимации», когда разнонаправленное излучение фокусируется в параллельные лучи.
- Поглощение электромагнитных волн. При этом HMIMOS действует как поглотитель падающих на интеллектуальную поверхность электромагнитных волн таким образом, что отражённые волны взаимно гасят друг друга.
9. Характеристики HMIMOS
По сравнению с сегодняшними технологиями беспроводных сетей, основное отличие HMIMOS, как уже отмечалось, в том, что появляется возможность управлять средой распространения электромагнитных волн. Это достигается путём как формирования нужной волны, так и управления отражённой волной от объектов окружающей среды, находящихся в зоне действия беспроводной сети. Структура HMIMOS обычно работает как либо как источник сигнала, либо как пассивный отражатель электромагнитных волн внешнего источника, с целью улучшения энергетической эффективности. Основные характеристики.
Основные характеристики интеллектуальных поверхностей HMIMOS, которые их отличают от massive MIMO и традиционных антенных систем, следующие:
- HMIMOS могут быть почти пассивными. В этом случае они не требуют никакой внутренней энергии для обработки поступающих извне электромагнитных волн, несущих информацию.
- HMIMOS могут реализовывать непрерывную апертуру антенны [18]. В настоящее время активно исследуются возможности эффективной по стоимости реализации непрерывных приёмо-передающих апертур, протяженных в пространстве.
- В HMIMOS отсутствуют т.н. «тепловые шумы» (thermal noise), поскольку пассивные HMIMOS не требуют преобразования полученной преобразования формы волны (baseband processing). Они лишь выполняют аналоговое преобразование непосредственно падающей на них электромагнитной волны. Поэтому шумы квантования, обработки сигнала и пр. отсутствуют.
- HMIMOS могут обрабатывать практически весь спектр частот – от почти звуковой частоты до терагерцовых частот и волн видимого спектра.
- Элементы HMIMOS точно конфигурироваться программным путём, с постоянным перепрограммированием параметров и режимов работы.
- HMIMOS имеют возможность быстрой программной реконфигурации их мета-материалов, в отличие от антенных массивов MIMO, которые не имеют таких эффективных средств программной реконфигурации.
Следует, однако, отметить, что не все архитектуры HMIMOS могут иметь все перечисленные свойства. Например, некоторые HMIMOS являются только пассивными, и как активные работать не могут.
9.1.1. Применения для телекоммуникаций
Все эти свойства HMIMOS дают возможность интеллектуально и быстро реконфигурировать беспроводную среду, в т.ч. сотовые сети, локальные беспроводные сети WiFi и другие. Таким образом, HMIMOS (RIS) является весьма перспективной технологией для создания беспроводной среды 6G.
10. Применения вне помещений
Для применения вне помещения рассмотрим дискретную пассивную RIS, состоящую из конечного числа элементов, которая может преобразовывать фазу падающего на неё радиосигнала и передавать такой преобразованный сигнал дальше. В применении вне помещений возможно множество сценариев применения и практически на всех уличных объектов имеется возможность так и ли иначе размещать RIS.
Например, в окнах зданиях можно размещать прозрачные RIS, которые могут как отражать радиоволны, так и пропускать их внутрь помещений, с преобразованием характеристик.
RIS могут служить как передаточное звено для подключения зон покрытия т.н. малыми сотами (Small Cells), в которых обычно не требуется покрытие с высокой пропускной способностью.
RIS можно размещать на летательных аппаратах с обслуживанием движущихся объектов, для достижения покрытия закрытых зданиями зон и других труднодоступных мест.

Рисунок 19. Варианты использования RIS вне помещений.
RIS могут расширять покрытие уличных базовых станций для пользователей внутри помещений, особенно в случаях, где нет прямого канала связи между абонентом и базовой станцией или на пути канала имеются существенные препятствия, не пропускающие радиосигнал.
RIS могут также повторно использовать энергию электромагнитных волн, и фокусировать её на целевых пользователях при помощи изменения фазы излучения отдельных элементов. В таких случаях, поверхности можно размещать так чтобы они обеспечивали релейную передачу информации, переносимую электромагнитной волной, в желаемое местоположение, при помощи эффективного формирования луча, которое может компенсировать затухание сигнала при передаче сигнала от базовой станции или нескольких соседних базовых при их совместной работе на одном канале.
Немаловажной особенностью RIS является и то, что могут обеспечивать безопасность на физическом уровне, например, они могут эффективно блокировать отражения сигнала базовой станции в направлении предполагаемых подслушивающих устройств.
RIS также можно использовать для беспроводной передачи энергии. Они могут «собирать» энергию окружающих радиоволн и направлять её для питания микро-устройств Интернета вещей (датчиков, сенсоров и пр.). Это даёт возможность решать давнюю проблему IoT – обеспечения сотен и тысяч микро-устройств надёжным и продолжительным электропитанием.
11. Заключение
Реконфигурируемые интеллектуальные поверхности RIS реализуют возможности по управлению беспроводной средой передачи, что ранее казалось недостижимым, однако, теперь RIS открывают новую эру в развитии радиосвязи, открывающую возможности, которые казались ранее нереализуемыми на практике.
RIS позволяют значительно расширить возможности формирования луча с использованием ИИ, что делает среду беспроводной передачи интеллектуальной. RIS может обеспечивать и функции физической безопасности, например для блокировки распространения сигнала определённой частоты в определённых направлениях.
Таким образом, RIS являются революционной основой для нового поколения беспроводных сетей доступа.
[1] Dian-Wu Yue, Ha H. Nguyen, and Yu Sun. mmWave Doubly-Massive-MIMO Communications Enhanced with an Intelligent Reflecting Surface, https://arxiv.org/pdf/2003.00282.pdf
[2] Akram Shafie et al. Terahertz Communications for 6G and Beyond Wireless Networks: Challenges, Key Advancements, and Opportunities, https://arxiv.org/pdf/2207.11021.pdf
[3] Qingqing Wu and Rui Zhang. Towards Smart and Reconfigurable Environment:
Intelligent Reflecting Surface Aided Wireless Network, https://arxiv.org/pdf/1905.00152.pdf
[4] Существуют даже опасения, что сигналы базовых станций 4G могут использоваться внеземными цивилизациями для слежения за активностью на Земле, см. https://www.dailymail.co.uk/sciencetech/article-12037649/Aliens-contact-Earth-using-signals-mobile-towers-experts-claim.html
[5] Шалагинов А.В. Уязвимости 2G GSM; https://shalaginov.com/2023/02/26/2g-gsm-network-vulnerabilities/
[6] Журнал НИИР №2, 2023 г.
[7] Анисимов А. Описание технологии Coordinated Multipoint (CoMP) в LTE-Advanced; http://anisimoff.org/lte/comp.html
[8] Maede Zolanvari, Emerging MIMO Technologies: Distributed, Cooperative, Massive, 3D, and Full Dimension MIMO; https://www.cse.wustl.edu/~jain/cse574-16/ftp/mimo.pdf
[9] Shuaifei Chen, Jiayi Zhang, Emil Björnson; A survey on user-centric cell-free massive MIMO systems; https://www.sciencedirect.com/science/article/pii/S2352864821001024
[10] Hengtao He, Xianghao Yu, Jun Zhang, S.H. Song, Khaled B. Letaief. Cell-Free Massive MIMO for 6G Wireless Communication Networks, https://arxiv.org/abs/2110.07309
[11] Di Renzo, M.; Zappone, A.; Debbah, M.; et al. Smart radio environments empowered by reconfigurable intelligent surfaces: how it works, state of research, and the road ahead. IEEE journal on selected areas in communications, 2020, 38(11): 2450–2525. DOI: 10.1109/JSAC.2020.300721
[12] Gong S, et al. Towards Smart Wireless Communications via Intelligent Reflecting Surfaces: A Contemporary Survey, arXiv:1912.07794v2 [cs.IT] 19 May 2020.
[13] Heater В. MIT’s RFocus technology could turn your walls into antennas; https://techcrunch.com/2020/02/03/mits-rfocus-technology-could-turn-your-walls-into-antennas/
[14] DoCoMo Conducts World’s First Successful Trial of Transparent Dynamic Metasurface; https://www.lightreading.com/docomo-conducts-worlds-first-successful-trial-of-transparent-dynamic-metasurface/d/d-id/756912
[15] Björnson E, Pei X., Yin H. RIS-Aided Wireless Communications: Prototyping, Adaptive Beamforming, and Indoor/Outdoor Field Trials; https://www.researchgate.net/publication/349704738
[16] Industry Specification Group (ISG) On Reconfigurable Intelligent Surfaces (RIS); https://www.etsi.org/committee/1966-ris?jjj=1680259775095
[17] Di Renzo M., Danufane F., Tretyakov S. Models for Reconfigurable Intelligent Surfaces: From Surface Electromagnetics to Wireless Networks Optimization; arXiv:2110.00833v2 [cs.IT] 12 Jul 2022.
[18]R. Fara, P. Ratajczak, D.-T. Phan-Huy, A. Ourir, M. Di Renzo, J. de Rosny, “A prototype of reconfigurable intelligent surface with continuous control of the reflection phase,” IEEE Wireless Communications, vol. 29, no. 1, pp. 70–77, 2022.
[19] Chongwen Huang, Marco Di Renzo, Merouane Debbah, et al. Holographic MIMO Surfaces for 6G Wireless Networks: Opportunities, Challenges, and Trends; https://arxiv.org/pdf/1911.12296.pdf
[20] A. Pizzo, T. L. Marzetta, and L. Sanguinetti, “Spatial characterization of holographic MIMO channels”; https://arxiv.org/abs/1911.04853, 2019.
[21] Okan Yurduseven, et al. Dynamically reconfigurable holographic metasurface aperture for a Mills-Cross monochromatic microwave camera; https://opg.optica.org/oe/fulltext.cfm?uri=oe-26-5-5281&id=381994
[22] M. Di Renzo, at al, “Smart radio environments empowered by reconfigurable AI meta-surfaces: An idea whose time has come,” EURASIP J. Wireless Commun. Netw., vol. 2019, no. 1, pp. 1–20, 2019.
[23] Prof. Sean Victor Hum, Univercity of Toronto. Radio and Microwave Wireless Systems; Continuous Arrays. https://www.waves.utoronto.ca/prof/svhum/ece422/notes/16-continuous.pdf
[24] Christos Liaskos, at al. Georgia Institute of Technology, School of Electrical and Computer Engineering. A New Wireless Communication Paradigm through Software-controlled Metasurfaces, https://arxiv.org/pdf/1806.01792.pdf
[26] I. F. Akyildiz, C. Han, and S. Nie, “Combating the distance problem in the millimeter wave and terahertz frequency bands,” IEEE Commun. Mag., vol. 56, no. 6, pp. 102–108, Jun. 2018.
[27] C. Liaskos, at al, “A new wireless communication paradigm through softwarecontrolled metasurfaces,” IEEE Commun. Mag., vol. 56, no. 9, pp. 162–169, Sep. 2018.
[29] https://pivotalcommware.com/
[30] Omar El Ayach, et al. Spatially Sparse Precoding in Millimeter Wave MIMO Systems, arXiv:1305.2460v1 [cs.IT] 11 May 2013; https://arxiv.org/pdf/1305.2460.pdf

Уведомление: Проблемы RIS: почему 3GPP не хочет стандартизировать технологию реконфигурируемых поверхностей | Telecom & IT